Difference between stable unstable and neutral equilibrium with examples
There are three types and states of equilibrium in physics.
- Stable equilibrium
- Unstable equilibrium
- Neutral equilibrium
Stable equilibrium
“A body is said to be in stable equilibrium if after a slight tilt it returns to its previous position.”

Consider a book lying on the table. Tilt the book slightly about its one edge by lifting it from the opposite side. It returns to its previous position when set free. Such a state of the body is called a stable equilibrium.
When a body is in stable equilibrium, its center of gravity is at the lowest position. When it is tilted, its center of gravity rises. It returns to its stable equilibrium as long as the center of gravity acts through the base of the body.
See Also: Difference between center of mass and centre of gravity
5 examples of stable equilibrium
- chair lying on the floor
- the heavy base of the vehicle
- table lying on the ground
- Cone lying on its base by lowering its center of gravity
- Bottle lying on its base
Why the base of the vehicle is kept low, wide, and heavy?
A vehicle is made heavy at its bottom to keep its center of gravity as low as possible. A lower center of gravity keeps it stable. Moreover, the base of a vehicle is made wide so that the vertical line passing through its center of gravity should not get out of its base during a turn.
Unstable equilibrium
“If a body does not return to its previous position when sets free after the slightest tilt is said to be in unstable equilibrium.”
Take a pencil and try to keep it in the vertical position on its tip. Whenever you leave it, the pencil topples over its tip and falls down. This is called an unstable equilibrium. In an unstable equilibrium, a body may be made to stay only for a moment. Thus a body is in an unstable equilibrium.
The center of gravity of the body is at its highest position in a state of unstable equilibrium. As the body topples over its base (tip), its center of gravity moves towards its lower position and does not return to its previous position.
Neutral equilibrium
“If a body remains in its new position when disturbed from its previous position, it is said to be in a state of neutral equilibrium.”
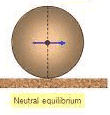
Take a ball and place it on a horizontal surface. Roll the ball over the surface and leave it after displacing from its previous position. It remains in its new position and does not return to its previous position. This is called a neutral equilibrium.
In neutral equilibrium, all the new states in which a body is moved, are the stable states, and the body remains in its new state. In neutral equilibrium, height, irrespective of its new position.
5 examples of neutral equilibrium
- Ball moving on the ground
- Motion of sphere
- A roller
- A pencil lying horizontally
- An egg lying horizontally on a flat surface
See related topics on our page: Mechanics
Examples of equilibrium
In applying the conditions for equilibrium (zero resultant force and zero resultant torque about any point), we can clarify and simplify the procedure as follows:
First, we draw an imaginary boundary around the system under consideration. This helps us to see clearly just what body or system of bodies to which we are applying the laws of equilibrium. This process is called isolating the system.
Second, we draw vectors representing the magnitude, direction, and point of application of all external forces. An external force is one that acts from outside the boundary that was drawn earlier. Examples of external forces often encountered are gravitational forces and forces exerted by strings, wires, rods, and beams that cross the boundary. Note that only external forces acting on the system need to be considered; all internal forces cancel one another in pairs.
There are some cases in which the direction of a force may not be obvious. To determine the direction of a certain force, make an imaginary cut through the member exerting the force at the point where it crosses the boundary. If the ends of this cut tend to pull apart, the force acts outward. If you are in doubt, choose the direction arbitrarily. A negative value for a force in the solution means that the forces act in the direction opposite to that assumption.
Third, we choose a convenient coordinate system along whose axes we resolve the external forces before applying the first condition of equilibrium. The goal here is to simplify the calculations. The preferable coordinate system is usually one that minimizes the number of forces that must be resolved into components.
Fourth, we choose a convenient coordinate system along whose axes we resolve the external torques before applying the second condition of equilibrium. The goal again is to simplify calculations, and we may use different coordinate systems in applying the two conditions for static equilibrium if this proves to be convenient. For example, calculating torques about a point through which several forces act eliminates those forces from the torque equation.
The torque components resulting from all external forces must be zero about any axis for equilibrium. Internal torques will cancel in pairs and need not be considered.
Related topics: