Different Types of forces and their Examples
Force is the external agent that produces motion. Basically, there are two main types of forces, contact forces, and non-contact forces. Gravitational forces, electric forces, magnetic forces, nuclear forces, and frictional forces are some examples of force.
In this Post, You Are going to learn about the Force Types in detail.
This Post also Includes a Lot of:
- Real-life examples of force
- Kinds of force
- Applications of force
- Effects of force
- Lots more
So If You If you Want to Get Great results from This post, You’ll Love this Post.
Keep Reading.
What is Force?
A force that moves or tends to move stops or tends to stop the motion of the object. The force can also change the direction of the motion of an object. It can also change the shape or size of the body on which it acts. Being a vector quantity it has magnitude as well as direction.
In classical physics, real forces are defined by a set of axioms, Newton’s laws of motion, with reference to an inertial reference frame. By Newton’s second law the resultant force F acting on a body of constant mass m is equal to ma, where a is the acceleration of a. Force is a vector quantity.
Forces are either long-range or short-range. Long-range forces, such as gravitation and the Coulomb force, fall off less rapidly than the inversion fourth power of the distance, short-range forces, such as those inside the atomic nucleus and those between molecules, fall off more rapidly than the inverse fourth power. It can be shown that in a condensed body, short-range forces are small at distances not much greater than those of near neighbors.
Some workers find it convenient to use fictitious forces in analyses. There are two kinds of forces, inertial forces, and inertial forces.
An inertia force is a fictitious force that is supposed to act on a body, being equal and opposite to the resultant of the real forces. Since it does not represent any actual interaction, an inertia force does not obey newton’s third law. According to the principle of d’Alembert (1742), any accelerated body can be treated as if it were in equilibrium under the action of the real forces and the fictitious one.
When a problem is considered from the point of view of an observer who is accelerated with respect to an inertial reference frame, Newtons’ laws are not applicable to real interactions. It is possible to apply these laws in such a case by introducing a fictitious force.
In particular, an observer on a rotating body may use an inertial force called a Coriolis force, which is supposed to act at right angles to the path of a body that moves towards or away from the axis of rotation. Problems with projectiles and movements of the atmosphere and oceans are often treated in this way.
When a particle of mass m moves in a circular arc of radius r with uniform angular velocity ω, there is an acceleration rω² towards the center, so by Newton’s second law the resultant force on the particle, called the centripetal force, is mrω², acting radially inward.
In the system of Alembert there is a fictitious inertia force on the equal to this, supposedly acting radially outwards. Also, an observer orbiting with the particle could introduce an inertial force that would be, in this case, equal and opposite to the centripetal force. Both fictitious forces may be called centrifugal forces since they are directed away from the center.
Now the centripetal force is real, so there must be an equal and opposite real force acting on another body, by Newton’s third law. This real force is also often called a centrifugal force.
In kinematics, we have studied the changes in motion only. Our understanding of the changes in motion is of little value without knowing its causes. The branch of mechanics that deals with the study of the motion of an object and the cause of its motion is called dynamics.
In this section, we shall study momentum and investigate what causes a change in the motion of a body and what role the mass of the body plays in its motion. This inquiry leads us to the concept of force. We shall also study Newton’s laws of motion and their applications.
Newton’s laws of motion are of fundamental importance in understanding the causes of motion of a body. Before we discuss Newton’s laws, it is appropriate to understand force, inertia, and momentum.
SI units for force
The SI unit of force is Newton denoted by N. According to Newton’s second law of motion: “One newton (1 N) is the force that produces an acceleration of one meter per second square in a body of mass 1 kg. Thus, a force of one newton can be expressed as:
1N = 1kg 1ms-2
1N = Ikgms-2
Two other systems of units in common use are the cgs (centimeter-gram-second) and the British systems. In the cgs system, the unit of force is done and is equivalent to the g cms-2. Since 1kg=1000 g and 1ms-2=100 cms-2, it follows that 1N =105 dyne. A dyne is a very small unit, roughly equal to the weight of a cubic millimeter of water. (A newton, on the other hand, is about the weight of a half cup of water).
In the British system, force is measured in pounds and acceleration in ft/s2.In this system, the mass that is accelerated at 1ft/s2 by a force of 1 lb is called the slug (from the word sluggish, meaning slow or unresponsive).
Table of the unit of force in different systems of unit.
| System | Unit of force |
| SI | Newton (N) |
| Cgs | Dyne |
| British | Slug |
Other variants of these basic systems are occasionally found, but these three are by far the most common.
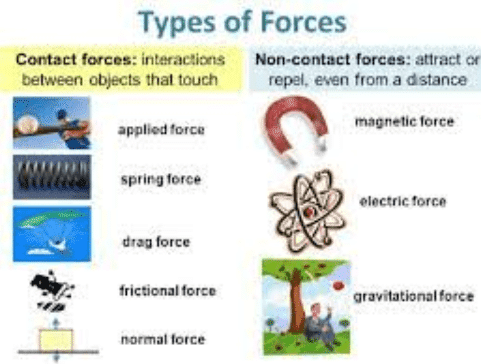
Types of forces with examples
Basically, forces are of two types:
- Contact forces
- Non-contact forces or At distance forces
-
Contact forces
Those forces represent the result of physical contact between two objects, where one of the objects exerts a force on the other.
5 examples of contact forces
- Stretching of the spring of a balance
- the pushing of a pram
- kicking of a football
- Pushing the door
- Hitting the ball etc are some examples of contact forces.
Types of contact forces
some types of contact forces are given in the list below:
- Applied force
- Normal force
- Frictional force
- Tension force
- Air resistance force
- Spring force
-
Applied force
Force due to the action of muscles is called applied force. It is also called muscular force.
Normal force
It is a contact interaction force between surfaces. It always acts perpendicular to the surfaces and out of the surface. It comes from the microscopic deformation of molecules modeling a system of springs.
Normal force examples
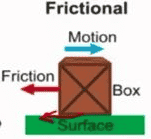
Frictional force:
Frictional force comes from interactions with a surface as an object moves or tries to move relative to the surface.
Tension force:
An applied force where force is applied through a string, cable, rope, etc..

Note that a tension force can only pull, it cannot push. We usually assume the tension in a cable is the same everywhere in the cable.
Air resistance force:

The force that acts in a direction opposite motion through a gas is called air resistance force. It comes from cumulative interaction with air molecules. It increases as the velocity through the gas increases. It also increases as the area normal to the direction of motion increases.
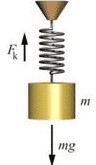
Spring force:
Spring force comes from the displacement of molecules. It is always opposite the displacement of spring.
Noncontact forces
Those forces do not involve physical contact between the two objects but act through the space between the two.
Non-contact forces examples
Examples of non-contact or action at a distance forces, which are given in the list given below:
- Gravitational force
- Electromagnetic force
- Weak nuclear force
- Strong nuclear force
The gravitational force of attraction:
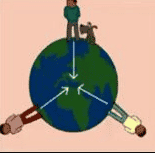
The attractive force exerted between two objects is called gravitational force. It originates with the presence of matter.
Electromagnetic force:
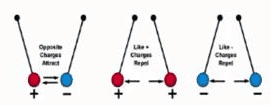
The electromagnetic force includes basic electric and magnetic interactions and is responsible for the binding of atoms and the structure of solids.

Weak nuclear force:
The weak nuclear force causes certain radioactive decay processes and certain reactions among the most fundamental particles.
Strong nuclear force:
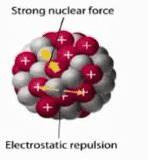
The strong force operates among the fundamental particles and is responsible for binding the nucleus together.
Ways to measure force
Force is measured in the dynamic method in which acceleration is imparted to a standard body by pulling on it with a stretched spring. Although convenient for the purposes of definition, it is not always a particularly practical procedure for the measurement of forces. (Acceleration is seldom easy to measure.
Another method for measuring forces is based on measuring the change in shape or size of a body (a spring, say) on which the force is applied when the body is unaccelerated. This may be called the static method of measuring forces.
The basis of the static method is that when a body under the action of several forces, has zero acceleration, the vector sum of all the forces acting on the body must be zero. This is, of course, just the second law of motion. A single force acting on a body would produce an acceleration; this acceleration can be made zero if we apply another force to the body equal in magnitude but oppositely directed.
In practice, we seek to keep the body at rest. If now we choose some force as our unit force, we are in a position to measure forces. The pull of the earth on a standard body at a particular point can be taken as the unit of force.
Suggested Topics:
One Comment